 平成26〜30年度 新学術領域(領域提案型)採択課題
認知的インタラクションデザイン学
〜意思疎通のモデル論的理解と人工物設計への応用〜
平成26〜30年度 新学術領域(領域提案型)採択課題
認知的インタラクションデザイン学
〜意思疎通のモデル論的理解と人工物設計への応用〜
計画研究班【C02】
人の適応性を支える環境知能システムの構築
人=人工物インタラクションにおいて,人工物が人の他者モデルを持ち,人にも人工物の処理状況を理解させる相互適応システムの実現に向けて研究を行っている.C02班では,人工物として,自律移動車椅子(人=動物インタラクションに近い存在),コミュニケーションロボット(人=人インタラクションに近い存在),インテリジェントルーム(人と動物の双方のインタラクションモデルの特徴を持つ可能性)に着目し,研究を行っている.
研究の方向性は,相互適応の実現方法および,ユーザインタフェースにおける他者モデルデザインを行う.相互適応では,自律移動車椅子といった自律性を持つ乗り物が,人馬一体の使用状況を実現するために,能動的に振る舞いながら登場者の他者モデルを車椅子が獲得する手法を研究する.相互適応を引き起こすことのできる学習モデルを探索していく.また,ユーザインタフェースの他者モデルにおいては,人馬一体のような,システムに人が含まれている場合,コミュニケーションロボットのようにシステムが他者として存在する場合,部屋のように,人がシステムの内部に含まれる場合を想定し,人にとって自然は人工物の他者モデルを調べる.さらに,他者モデルの形態に応じて相応しいインタラクションの方式をデザインする.
構成メンバー
| 研究者名 | 役割 | 研究内容 | Web |
|---|---|---|---|
|
今井 倫太 (慶応義塾大学) |
研究代表者 |
研究統括,計画立案 対人工物認知のモデル化 |
link |
|
小野 哲雄 (北海道大学) |
研究分担者 | アンビエントエージェントの実験システム構築及び研究 | link |
|
大澤 博隆 (筑波大学) |
研究分担者 | エージェントの身体化モデルの研究 | link |
|
篠沢 一彦 (ATR) |
研究分担者 | ロボット型エージェントの知見提供 | link |
|
長谷川 孔明 (慶応義塾大学) |
研究員 | ロボット型エージェントの研究 |
これまでの主要な研究成果 概要
本研究では,人工物の種類の違いによらずに統一的に人-人工物インタラクションのデザインに関して考えるために,インタラクションを三つの層に分け,階層間の連携方法の観点から研究している.人-人工物インタラクションに今性を持たせる階層(今性の層),人と人工物がお互いに心的状態を読み合う層(心を読み合う層),人と人工物が言葉や知識を用いてインタラクションする層(高次インタラクションの層)に分け,それら層間の連携に注目する.今性とは,人工物が実時間で反応することであり,同じ時刻に同じ環境を人工物と共有している感覚を人に持たせる効果がある.人工物が今性を示すことで,人が人工物に対して心的状態を想定し心を読み合うインタラクションが生じると予想される.また、言葉や知識を用いた高次のインタラクションは,自律的に駆動する人工物の場合,心を読み合うインタラクションが成立していることが重要である.
研究1: 人工物のための他者モデルの研究(人型エージェントのための他者モデル)
今性の層と心を読み合う層の連携の観点から,二体のロボットの視線の研究を行った.具体的には,被験者の前にいる二体のロボットが,被験者の後方にある物体に視線を向ける際に,二体が同時に視線を向ける場合と,二体が順番に視線を向ける場合を比較した.結果として同時に視線を向けた場合にのみ,被験者の注意が後方に誘導された(下左図).二体が同時に視線を向ける行動は,ロボット二体間で繰り広げられる今性のある行動として解釈でき,今性の層の成立によって,被験者がロボットの意図を読み,心を読み合う層を生じさせたと考えることができる.
三つの層間の連携を研究するために,プロジェクタを用いたロボットを構築した(下右図).半球状の頭部に顔の映像をプロジェクタで投影することで,モータを用いたロボットでは不可能な素早い頭部の回転や視線の移動を実現する.プロジェクタロボットの素早い頭部表現を用いることで,今性の層と,他の2層の関係を探る準備が整った.

研究2: 人工物の身体化モデルの研究
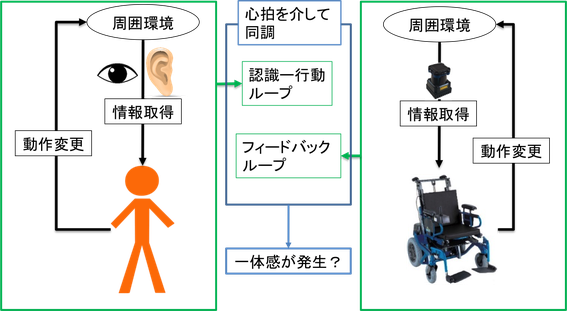
身体化モデルの研究では,搭乗型エージェントとして自律走行車椅子,装着型エージェントとしてエージェンシーグラスの研究を行っている.自律走行車椅子の研究では,車椅子への命令を例題とした高次インタラクションの研究および,車椅子の身体化に関する研究をした.車椅子の命令の研究では,「大きく曲がれ」や「早く行け」といった人の主観で決まる程度量表現を含む音声命令を扱った.車椅子が認識している地形情報と個人の程度量表現を結び付けることで,個人に適応する形で程度量表現を扱うことのできる高次インタラクションの層を実現した.また、車椅子の身体化の研究では,周囲の環境や車椅子の挙動から無意識に人が感じるストレスを心拍で拾い車椅子の制御に影響させるシステムを構築した.人の緊張と車椅子の挙動の同調が起きることで同システムが身体化に貢献できるのか検討した(下図).結果,人の緊張に応じて車椅子の挙動は変化し適応的に動作するものの,一体感を感じさせることができなかった.一体感が薄れた原因は,現れた車椅子の挙動の意図が人から見て分かりづらいものであったことにあると考えられる.心を読み合う層での意図の共有が身体化モデルにおいては重要となる可能性が分かった.
エージェンシーグラスの研究では,人の目の映像をサングラスに投影するメガネを構築した.メガネを掛けることで,掛けた人の目の表情や視線の動きを人工的に制御できる.本研究では,視覚障害者にエージェンシーグラスを用い,コミュニケーション中の視線の動きの一部を補助できた.今性の層を中心にデザインした人工物で,人同士のコミュニケーションも支援できることが明らかになった.
研究3: 身体が不定なアンビエントモデルの研究
様々な機器に移動してサービスを行うマイグレートエージェントの研究を行った(下図).エージェントの意図・信念・欲求といった心的状態に応じて意思決定するBDI理論を用いて,エージェントの意図的な行動を一貫性のある形で実行し,心を読み合う層と高次インタラクションの層の連携を実現した.

【公募研究】
1. 人らしさを生み出す相互作用における時間遅れに対する安定性(飯塚)
二人の人が,レール上のプローブをスライドさせ,お互い同じ位置にプローブがあるときに振動を感じるシンプルなシステムを用いて,人は振動を与える対象に人らしさを見出すかを検討した.相手が人であることを知らされていない参加者が探索的にプローブをスライドさせることでどのような他者モデルを構成するのかを調べた結果,各ペアが作り出す相互作用の速さに応じて,時間遅れに対する安定性が異なり,遅い方が人らしさを発見しやすいことがわかった.
2. 電動車椅子ライフログが示すユーザと環境のインタラクション(硯川)
電動車椅子の長期的な走行データの分析から,車椅子操作者が段差や路面凹凸等の環境的な走行阻害因子を認識し,ジョイスティック操作に反映することで車体挙動への影響を抑制する様子を分析した.


